

Il progetto MakinGames 2018 è consistito in una serie di laboratori pratici rivolti a ragazzine/i delle medie di Trento per presentare un uso creativo dell’informatica attraverso l’insegnamento della programmazione di piccoli videogiochi, siti internet, schede elettroniche, robot e cartografia collaborativa online.
Il progetto è stato realizzato all’interno del Piano Giovani di Trento, in collaborazione con la Provincia di Trento e l’Assessorato alle Politiche Giovanili della Provincia di Trento.
Alcuni laboratori sono stati insegnati in lingua inglese nell’ambito di progetti CLIL. Il progetto ha promosso il pensiero computazionale, l’educazione al lavoro e la cittadinanza attiva.
Si sono svolte 150h di laboratori coinvolgendo circa 530 ragazzini, con interventi alle medie Manzoni (ICTN6, insegnanti Moira Stefini, David Dinella, Luisa Mattevi), Bronzetti (ICTN3, insegnante Francesca Donati) a Trento, e le Medie Pedrolli a Gardolo (ICTN7, insegnanti Claudia Schembari, Maria Poli e Paola Zanolini). Sono stati previsti momenti di condivisione finale al Festival dell’Economia ospitati nelle casette della Fondazione Demarchi, e in classe con genitori e alunni alle Manzoni. Durante tutto l’anno i ragazzini interessati sono stati invitati ai laboratori gratuiti CoderDojo che si tengono ogni due Sabati pomeriggio in biblioteca in via Roma.
Tra i formatori di CoderDolomiti che hanno condotto i laboratori hanno partecipato David Leoni e Massimiliano Luca, in alcune occasioni assistiti dai volontari Alessandro Ebranati, Paolo Berizzi, Fabio Darolt e Matteo Luca.
Coding in inglese alle Manzoni IC Trento 6
Sono stati realizzati laboratori di coding in inglese con metodologia CLIL alle medie Manzoni IC6 a Trento, in collaborazione con i docenti Moira Stefini e Davide Dinella:

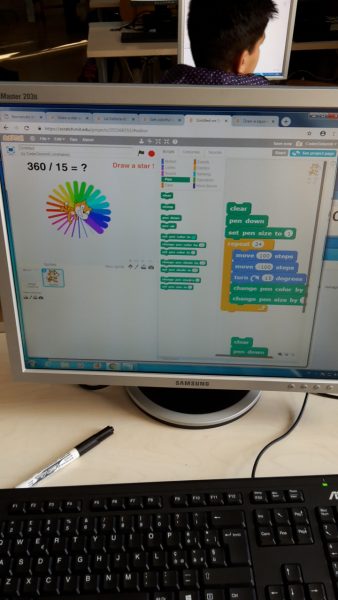
I laboratori hanno portato alla realizzazione di una galleria di progetti in Scratch che abbinano coding e geometria di cui riportiamo un esempio:
Robotica alle Pedrolli IC Trento 7
Sono stati realizzati laboratori di costruzione e programmazione robot Edison alle medie Pedrolli IC7 a Gardolo, in collaborazione con le docenti Claudia Schembari e Maria Poli.
Costruzione robot
I laboratori si sono focalizzati sulla costruzione di robot Edison con l’aggiunta di pezzi Lego Technic




Tutorial
I laboratori hanno portato alla realizzazione di questo tutorial, che è stato messo a disposizione sul sito di CoderDojo Trento:

Modelli realizzati
Grazie alla loro fantasia, prendendo ispirazione dal tutorial proposto, i ragazzi e ragazze hanno realizzato una quantità di modelli sfruttando principi meccanici, come trasmissione rotazione con ingranaggi e cinghie, e cambio assi di rotazione:








Testing dei robot
Una volta costruiti, i robot sono stati testati sul pavimento, a volte anche disegnando dei percorsi specifici:







Programmazione robot
Alcuni comportamenti dei robot sono stati programmati utilizzando i computer, con l’ambiente di programmazione visuale EdBlockApp


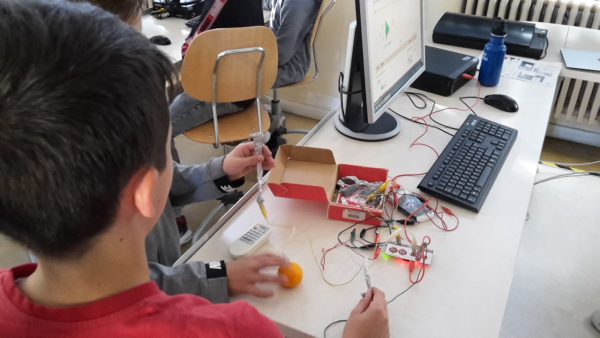
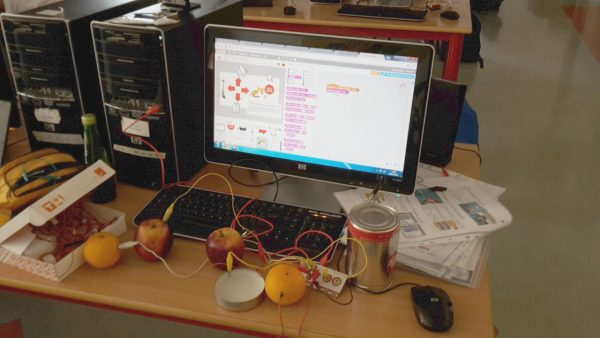
Schede elettroniche e robot
Per i laboratori di elettronica abbiamo usato schede Arduino a cui i ragazzi hanno collegato componenti come luci LED, bottoni, e sensori di luce , calore, tatto con il kit didattico TinkerKit. Le schede sono state programmate con il software visuale a blocchi Scratch4Arduino, che semplifica notevolmente gli ostacoli tecnici e permette in poco tempo di impostare comportamenti del tipo ‘se si preme il bottone, fai lampeggiare le luci’. Questi laboratori sono stati proposti alle medie Pedrolli IC Trento 7 a Gardolo con classi terze a indirizzo musicale delle insegnanti Claudia Schembari, Paola Zanolini e Maria Poli, i cui alunni hanno anche provato a creare strumenti musicali elettronici. L’argomento hardware è stato anche affrontato alle medie Bronzetti IC Trento 3 con classi dell’insegnante Francesca Donati.
Arduino TinkerKit alle medie Pedrolli







Breadboard Arduino alle Bronzetti
Alle Bronzetti sono anche stati svolti laboratori più avanzati usando componenti elettronici commerciali (led e resistenze) montati su breadboard.





Geografia Collaborativa Online
A diverse classi è stato proposta geografia collaborativa online basata su OpenStreetMap, la mappa libera del mondo realizzata da volontari. Alle medie Pedrolli IC Trento 7 le lezioni sono state condotte in italiano in collaborazione con le insegnanti Claudia Schembari, Maria Poli e Paola Zanolini. Alle medie Bronzetti IC Trento 3 le lezioni sono state proposte con slide in inglese per una sperimentazione CLIL, con classi dell’insegnante Francesca Donati.
Struttura delle lezioni: A ciascuna classe sono stati proposti 2 laboratori da 2 ore ciascuno. Durante la prima ora di lezione, si è esposto il valore dei beni digitali creati collaborativamente, prendendo come esempio Wikipedia e OpenStreetMap. Agli alunni sono state quindi consegnate mappe su carta della zona circostante la scuola (create sul sito FieldPapers), e si è usciti a rilevare punti sul territorio, come segnali stradali, numeri civici, idranti, panchine. Nella seconda lezione da due ore si è andati in laboratorio e usato il servizio CrowdMap per creare una mappa di classe in modo collaborativo al computer. Infine, si è utilizzato il tutorial online di OpenStreetMap per imparare come si inserisce un punto nella vera OpenStreetMap.

Materiale prodotto:
– guida per insegnanti in italiano, liberamente disponibile sul sito di CoderDojoTrento, contiene resoconto dettagliato di questa e altre esperienze. Una versione della guida sarà anche pubblicata in un libro per insegnanti delle scuole elementari edito dal CINI (Consorzio Interuniversitario Nazionale per l’Informatica).
– slide in italianofinale
– materiale per studenti in italiano
– slide in inglese
– materiale per studenti in inglese










Momento condivisione finale alle Manzoni
I genitori dei ragazzi delle medie Manzoni IC Trento 6, in occasione della Settimana Europea del Codice sono stati invitati ad un momento di condivisione finale in cui hanno creato assieme ai figli delle cartoline di Buone Feste interattive con il linguaggio di programmmazione visuale Scratch, e alcuni di loro hanno poi proseguito i lavori a casa coi figli.









Momento condivisione al Festival dell’Economia
I ragazzi delle Bronzetti e una classe delle Manzoni sono stati invitati ad un momento di condivisione al Festival dell’Economia nelle casette messe gentilmente a disposizione dalla Fondazione Demarchi.



